作者简介:
马思敏(1987—),男,硕士,工程师,主要从事无损检测设备的开发工作
反应堆压力容器是核裂变反应发生器的核心装置,是核安全的第二道保护屏障,也是核岛内唯一一个不可更换的主设备。其基本功能为:建立并维持一回路系统的压力、固定包容堆芯及堆内构建,将核燃料的链式反应限制在一回路中[1]。由于该设备长期在高温、高压、高辐照、腐蚀性环境下工作且不可更换,故确保该设备的稳定运行是核电无损检测工作中的重中之重。
反应堆压力容器主螺栓孔是压力容器密封系统的主要受力部件之一,是顶盖设备的重要组成部分[2]。由于每次换料大修均需通过主螺栓的旋出和旋入来开关反应堆压力容器顶盖,故主螺栓孔容易产生接触损伤[3]。针对压力容器主螺栓孔不易检测的难题,笔者开发了一套螺栓孔内表面视频扫查装置,介绍了该装置的研制方案和系统构成,并对其进行了功能测试,旨在降低现场工作人员承受的辐射剂量,提高核电机组在役检查的效率。
1. 技术方案
1.1 关键技术
该装置需要解决的关键技术主要有2个:① 装置在RPV(反应堆压力容器)法兰表面绕圆心实现圆周运动;② 装置在指定螺栓孔处精确定位。
1.2 技术路线
1.2.1 圆周运动技术方案
装置绕法兰面进行圆周运动是靠机械结构实现的,扫查装置行走机构结构示意如图1所示。
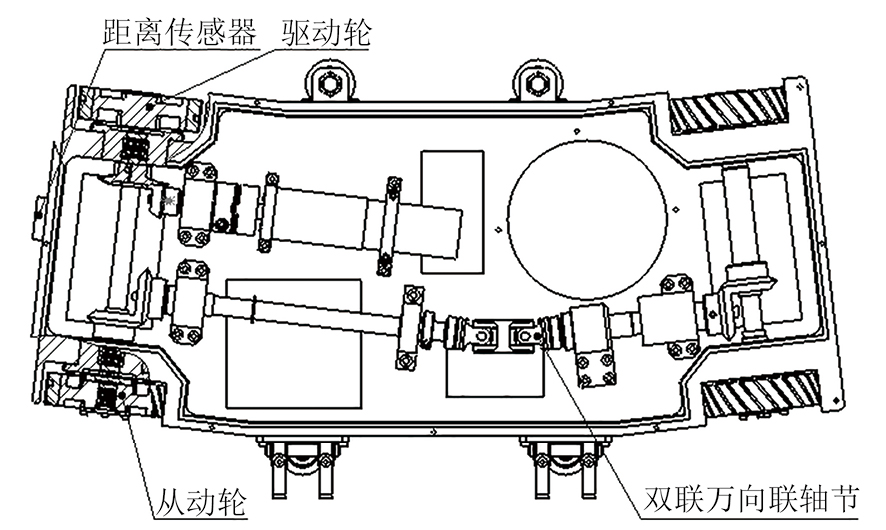
行走模块的外壳为圆弧形,圆弧的几何圆心即为顶盖法兰的圆心,两个前轮的轴线与两个后轮轴线夹角为13°。理论上一个电机即可驱动装置绕法兰面进行圆周运动。在壳体内部,直流伺服电机安装在底盘内侧,电机的方向与车轮前轴垂直,通过锥齿轮组将动力传递给双联万向联轴节,在设计上要保证联轴节的主动轴和从动轴与中间轴的夹角α相等。双联万向联轴节的速度传递示意如图2所示。
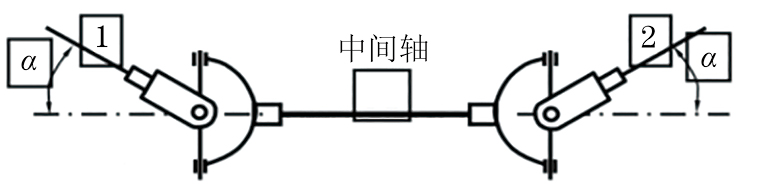
此时双联万向联轴节瞬时角速度传递公式可写为

式中:ω1为主动轴的速度;ω2为从动轴的速度;ωM为中间轴的角速度;ϕM为中间轴的转角。
由此可以得出结论,ω1=ω2,主动轴和从动轴在任意时刻的瞬时角速度相等,由此可以保证前后轮瞬时转速一致。由于圆周运动中内外侧轮转速不一致易引起车轮打滑,内侧两轮设计为驱动轮负责动力输出,外侧轮内部镶嵌有轴承使其作为从动轮自由转动。行走机构的两侧布置有靠轮,其在工作时紧靠在法兰两侧的内外壁上,补偿设计及加工误差引起的行走路线偏离。
1.2.2 螺栓孔定位技术方案
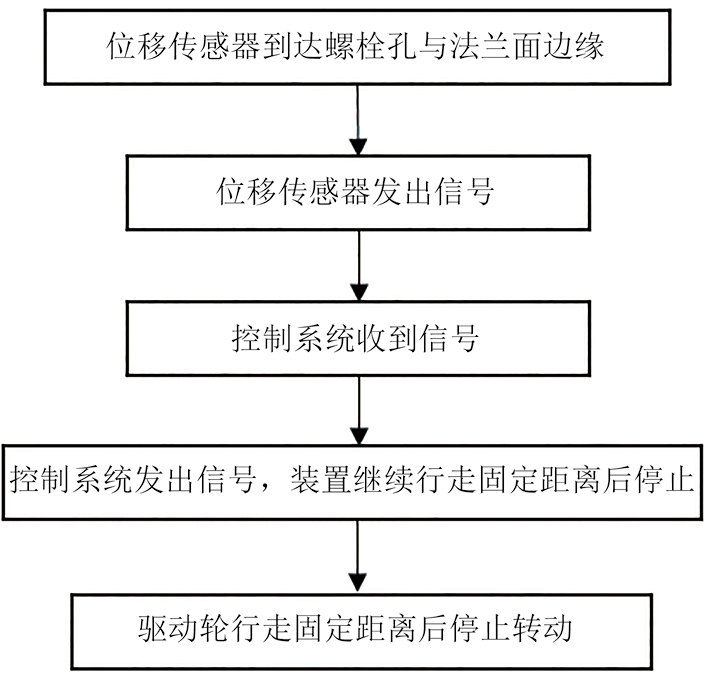
扫查装置的定位是靠设备前端的距离传感器实现的。当设备进行环绕运动时,距离传感器检测对象为压力容器法兰表面,在经过螺栓孔时,由于螺栓孔底部与法兰面存在明显高度差,传感器内部电压由高电平变为低电平,控制系统控制伺服电机向前行走固定距离,使扫查摄像头行走至螺栓孔正中心,如此控制可消除行走装置累计误差的影响。视频扫查装置的定位控制流程图如图3所示。
2. 系统构成
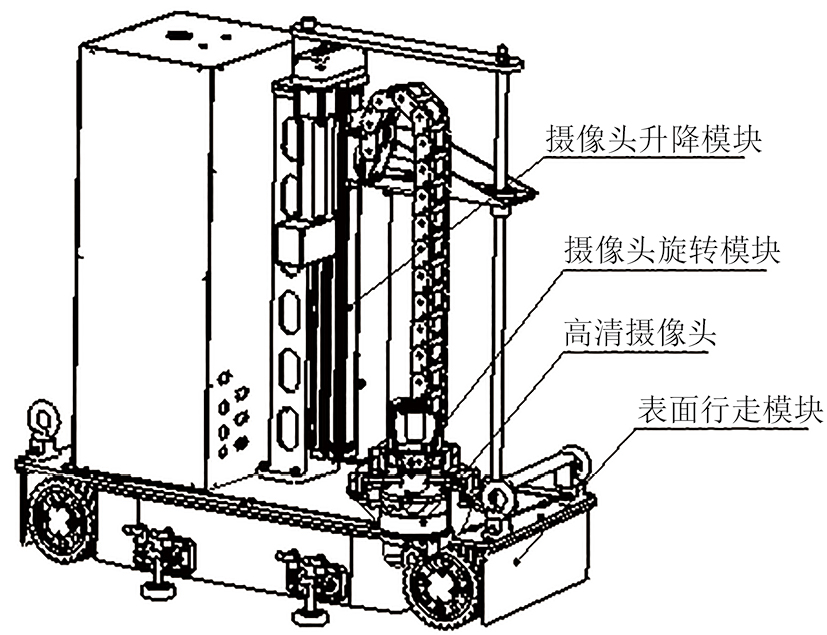
反应堆压力容器主螺栓孔视频扫查装置由机械模块、电气控制模块和操作软件3部分组成。机械模块由表面行走模块、摄像头升降模块、摄像头旋转模块3部分组成。该视频扫查装置结构如图4所示。
2.1 机械模块
2.1.1 表面行走模块
表面行走模块是设备的主要承载机构,主要承载摄像头升降模块、摄像头旋转模块、控制箱等机构。表面行走模块通过结构设计,实现了采用一个直流伺服电机便可使设备在RPV法兰外表面进行圆周运动。设备运动的停止则通过传感器实现了自动控制。
2.1.2 摄像头升降模块
摄像头升降模块负责实现视频摄像头在螺纹孔内的伸入和退出功能。该模块采用进口直线模组进行直接传动,直流伺服电机进行动力输出,为克服重力矩的偏置影响,模组对侧布置直线导向轴和轴承进行辅助导向。摄像头旋转模块通过圆筒及连接架与直线模组相连(摄像头旋转模块在表面行走过程中藏于壳体内)。
2.1.3 摄像头旋转模块
摄像头旋转模块布置在升降模块的下方,采用高精度DD(直接驱动)马达直接驱动。马达一端与升降模块的圆筒固定连接,一端与摄像头支架连接以实现摄像头的旋转运动,圆筒内部有滑刷辅助走线。该模块内置的200万像素高清摄像头负责对螺栓孔的扫查,其实物如图5所示。

2.2 电控模块
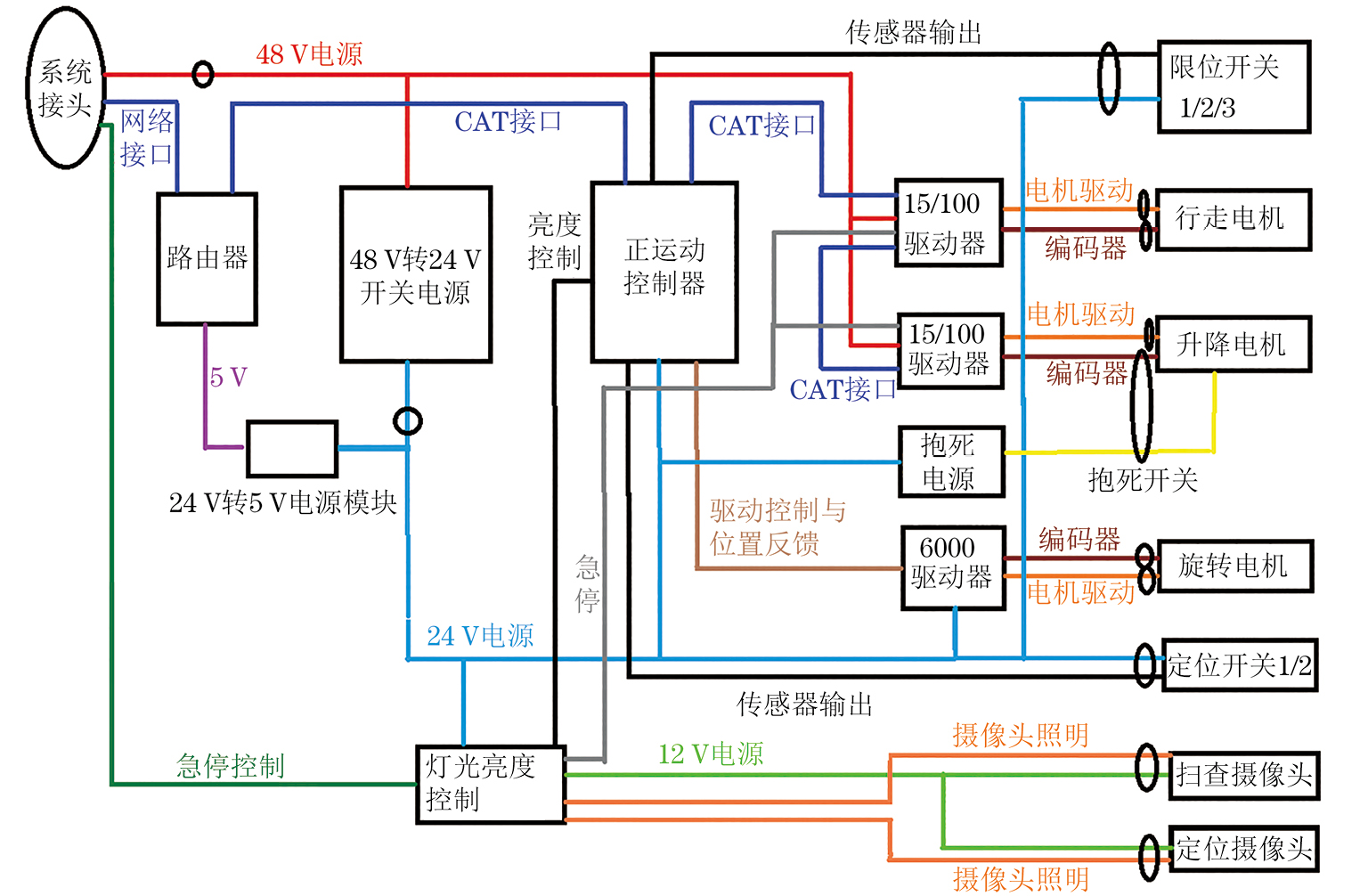
系统的电控模块集成在设备的一端,分别由主电源系统、电源转换模块、主控制器、三个运动轴的驱动器、传感器、交换机及连接线路等组成。
主电源系统包含48 V输入电源以及48 V/24 V降压开关电源,48 V电源可直接作为3个运动轴的驱动电源,48 V/24 V降压开关电源可作为主运动控制器、传感器、视频及照明电源等部分的电源。
设备运动主控制卡采用ZMC432型总线运动控制器,通过系统的标准伺服控制,分别控制设备的3个直流伺服电机,此3个伺服电机分别控制设备实现表面行走运动、摄像头升降运动及摄像头旋转运动。电控模块的电气连接线路图如图6所示。
2.3 软件模块
反应堆压力容器视频扫查装置软件系统使用C语言开发,采用面向对象的开发设计模式。软件主要具有以下功能:① 螺栓孔检查状态显示;② 设备状态显示;③ 手动控制;④ 自动控制;⑤ 视频字符叠加设置。
(1)螺栓孔检测状态显示
根据当前实际检查状态,软件上会呈现出螺栓孔的检查状态,其状态实时更新,绿色代表已检查,红色代表不检查,黄色代表待检查。
(2)设备状态显示
主要对视频信息、网络状态、设备状态、视频状态、录制状态的异常情况进行监督和反馈。
(3)手动控制
该部分主要功能是实现设备的手动控制,包括分别手动控制3个运动轴的运动、连接并录制视频、拍照截屏、调整摄像头上LED(发光二极管)照明灯亮度等。此外,软件的操作会记录在操作日志框内,便于用户查询。
(4)自动控制
自动控制模块的主要功能包括:① 检查计划设定;② 各个轴的速度设置;③ 自动开始扫查功能;④ 扫查过程中自动暂停与恢复功能;⑤ 软件急停功能。
(5)视频字符叠加设置
视频字符叠加设置功能可实现在扫查界面实时显示当前扫查螺栓孔号及位置坐标等信息。
3. 试验结果与分析
3.1 系统运行试验
首先,将设备置于模拟压力容器法兰面上,往复运动3 h。试验结果表明,机械与控制系统表现正常,稳定性良好,无卡涩、系统报警等异常现象。
然后,将设备置于模拟压力容器法兰面上,采取自动扫查模式寻找模拟体上的所有螺栓孔,试验结果表明,螺栓孔定位准确,符合设备的功能要求。系统运行试验现场如图7所示。

3.2 扫查效果试验
在模拟压力容器法兰面上,对整个系统连续进行了螺栓孔扫查试验,某位置的扫查视频截图如图8所示。
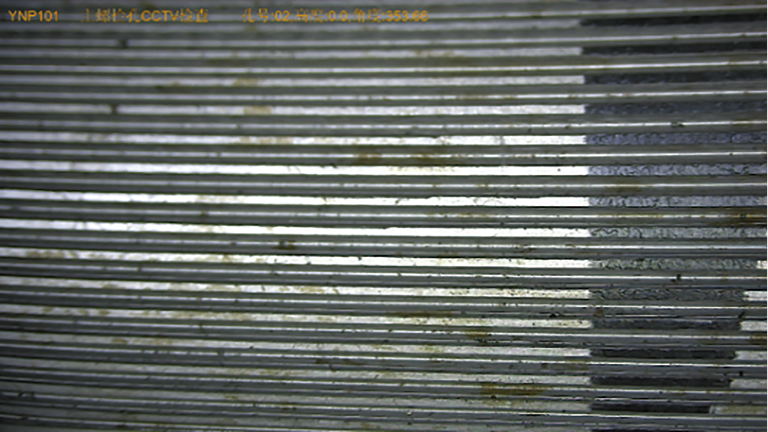
对该截图进行分析,经计算,发现该图像的横向畸变率为2.5%,纵向畸变率为3.4%,图像清晰,畸变率低,可满足使用需求。
4. 无损检测证书挂靠网结语
为解决反应堆压力容器主螺栓孔不易检测、检测效率低的问题,研制了一套视频扫查装置并进行扫查试验。试验结果表明,该设备可在RPV法兰表面绕圆心实现圆周运动以及在指定螺栓孔处精确定位,各项性能均达到预期要求,并可以提供高清视频图像记录,满足在役检查的现场检查需求,提高了核电机组在役检查的效率。